类库
› isaac_ros_visual_slam
NVIDIA-ISAAC-ROS/isaac_ros_visual_slam
基于NVIDIA cuVSLAM加速的ROS 2视觉SLAM包,利用立体相机和IMU实现高精度实时定位与建图。适用于GPS受限环境(如室内或城市),为移动机器人提供可靠里程计输入,支持地面机器人及无人机应用。
截图
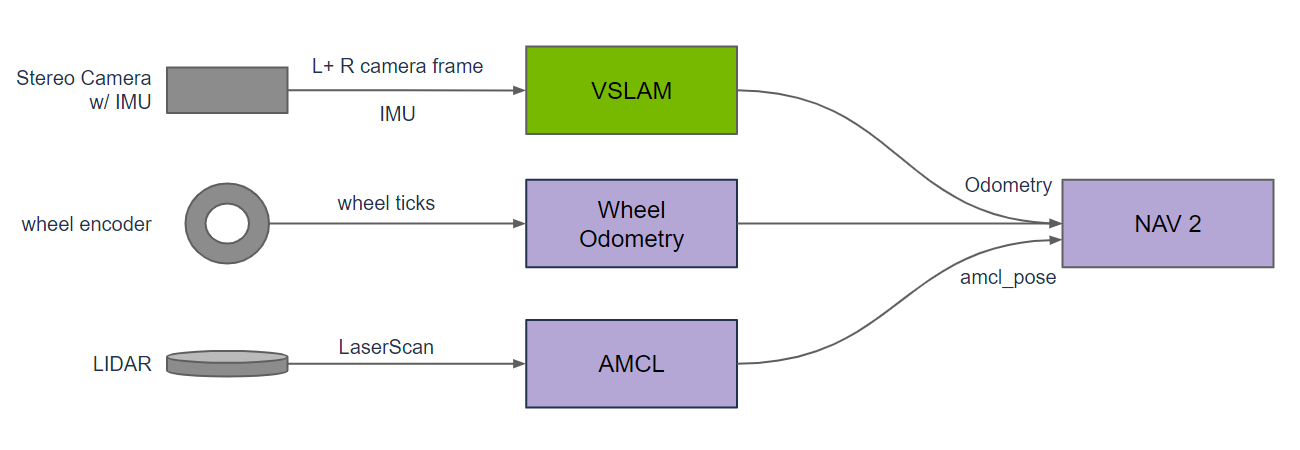
基于NVIDIA cuVSLAM加速的ROS 2视觉SLAM包,利用立体相机和IMU实现高精度实时定位与建图。适用于GPS受限环境(如室内或城市),为移动机器人提供可靠里程计输入,支持地面机器人及无人机应用。


