类库
› unidrivevla
xiaomi-research/unidrivevla
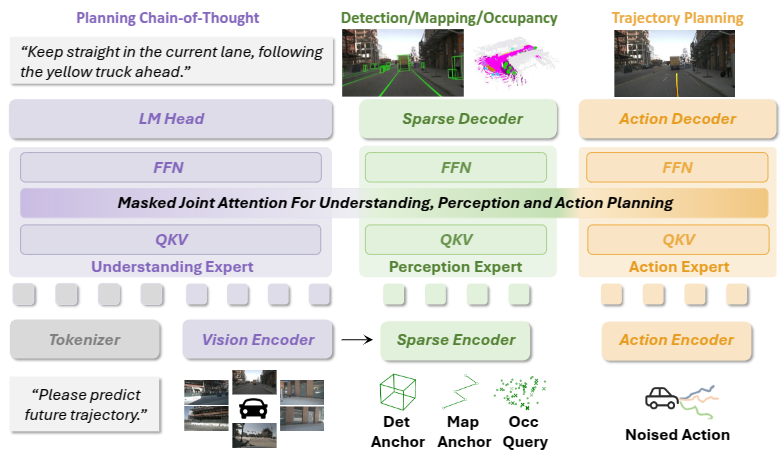
UniDriveVLA是一个用于自动驾驶的Python开源项目,旨在统一理解、感知和行动规划。它结合了视觉语言模型与自动驾驶技术,提供统一的端到端解决方案,适用于智能驾驶场景中的环境感知与决策控制。
技术栈
Bench2Drive/bench2drive/leaderboard python
网络
Requests
查看全部依赖 (6)
依赖
dictor
opencv-python
pexpect
pygame
tabulate
transforms3d
Bench2Drive/bench2drive/scenario_runner python
查看全部依赖 (12)
依赖
NumPy
Shapely
ephem
matplotlib
networkx
opencv-python
psutil
py-trees
simple-watchdog-timer
six
tabulate
xmlschema
third_party/transformers-4.57.1/benchmark_v2 python
查看全部依赖 (7)
依赖
NumPy
datasets
gpustat
huggingface_hub
psutil
torch
transformers
截图