类库
› wb-mpc-locoman
lukasmolnar/wb-mpc-locoman
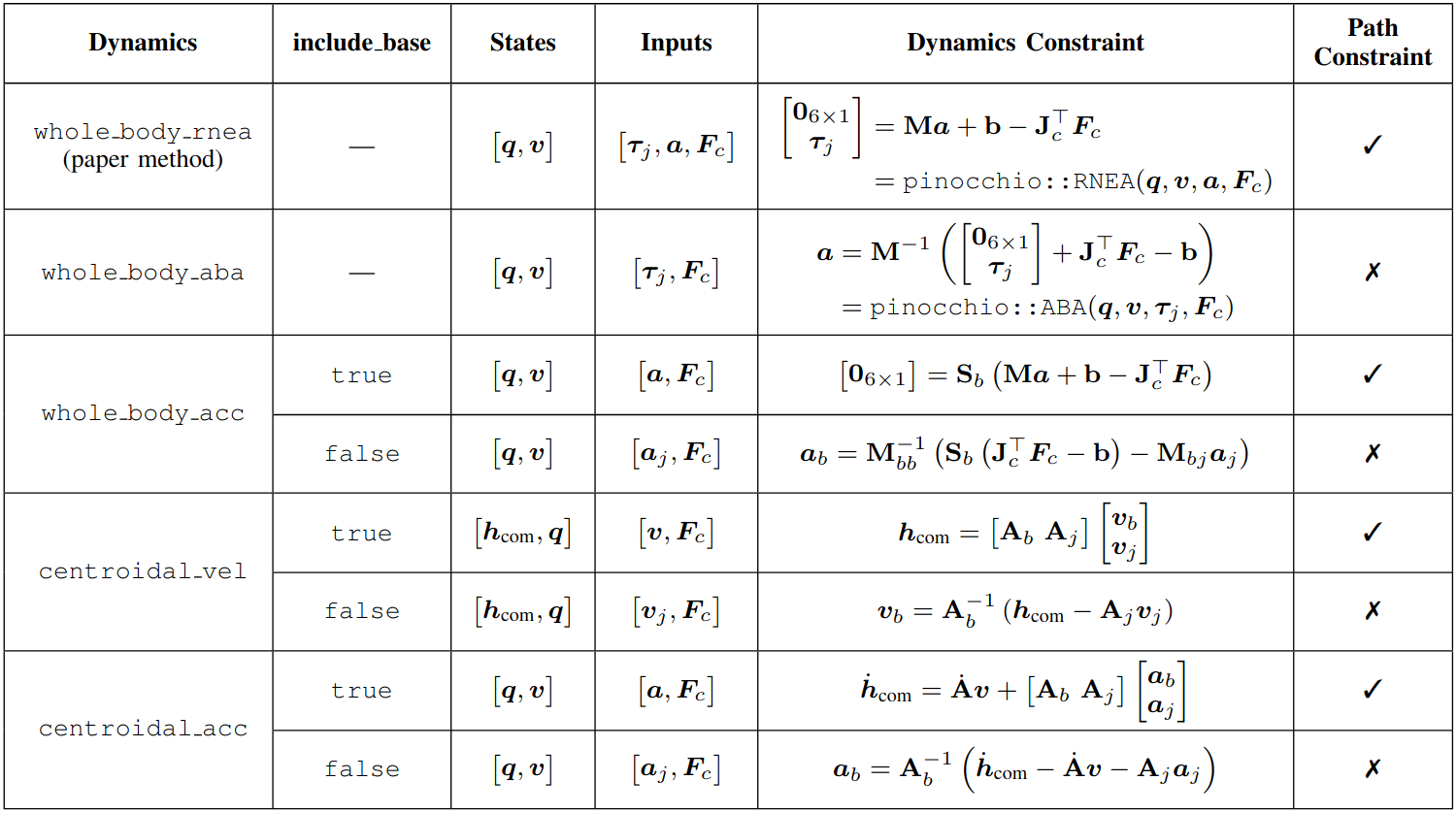
该仓库提供全身位置操作模型预测控制框架,基于Pinocchio和CasADi构建。支持多种动力学建模与求解器后端,用于足式机器人的全身逆动力学MPC研究,适用于IEEE RA-L 2025论文相关算法验证与仿真。
技术栈
根目录 python
查看全部依赖 (5)
依赖
matplotlib
meshcat-python
osqp
pinocchio
3.3.0
python
3.12
截图