类库
› unifolm-world-model-action
unitreerobotics/unifolm-world-model-action
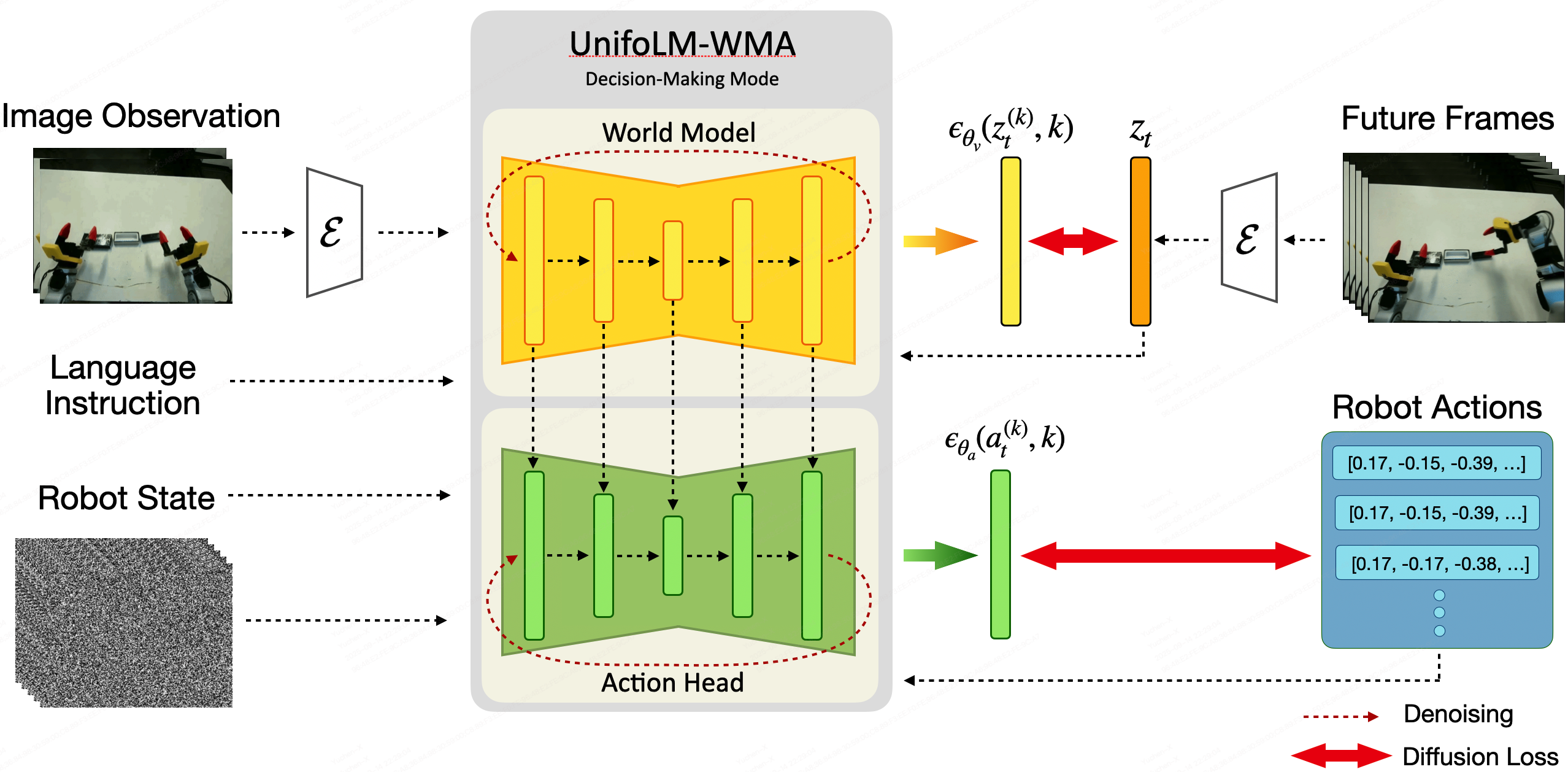
UnifoLM-WMA-0是宇树科技开源的世界模型与动作框架,专为通用机器人学习设计。它通过理解机器人与环境的物理交互,提供仿真引擎生成合成数据,并增强策略决策能力,支持多种机器人形态的实验与部署。
UnifoLM-WMA-0是宇树科技开源的世界模型与动作框架,专为通用机器人学习设计。它通过理解机器人与环境的物理交互,提供仿真引擎生成合成数据,并增强策略决策能力,支持多种机器人形态的实验与部署。
inicio
-
Wiki
Copyright © 2011-2026 iteam.
Current version is 2.155.2.
UTC+08:00, 2026-06-10 17:50
浙ICP备14020137号-1
$mapa de visitantes$


